¶ Matériel
Raspberry PI 4 8GB
¶ Datasheet et lien
raspberry-pi-4-product-brief.pdf
raspberry-pi-4-reduced-schematics.pdf
https://www.raspberrypi.com/documentation/
¶ Application
¶ SSH
Voici les informations pour se connecter par ssh au Raspberry PI de roboguard:
ssh: capra@Roboguard-pi
username: capra
password: Demander
¶ Drive
Repository de CAPRA : https://github.com/clubcapra/ros_odrive
Nous retrouvons dans le Repo les différents package ROS2 afin de controler les moteurs de Rove avec les ODrive.
¶ Ros2
¶ Micro-Ros
Pour démarrer le service micro-ros
systemctl start --user micro-ros.service
Pour visualuser les informations du topic dans le docker:
ros2 topic echo [non du topic]
¶ Docker
¶ Micro-Ros
Le docker micro-ros part automatiquement au démarage du Raspberry pi.
Pour avoir une console dans le docker de micro-ros.
docker exec -it [nom du docker] bash
Les topic Ros du docker sont:
/RoboGuard/ambiant_temp
/RoboGuard/battery
/RoboGuard/humidity
/RoboGuard/thermistors
Pour visualuser les informations du topic dans le docker:
ros2 topic echo [non du topic]
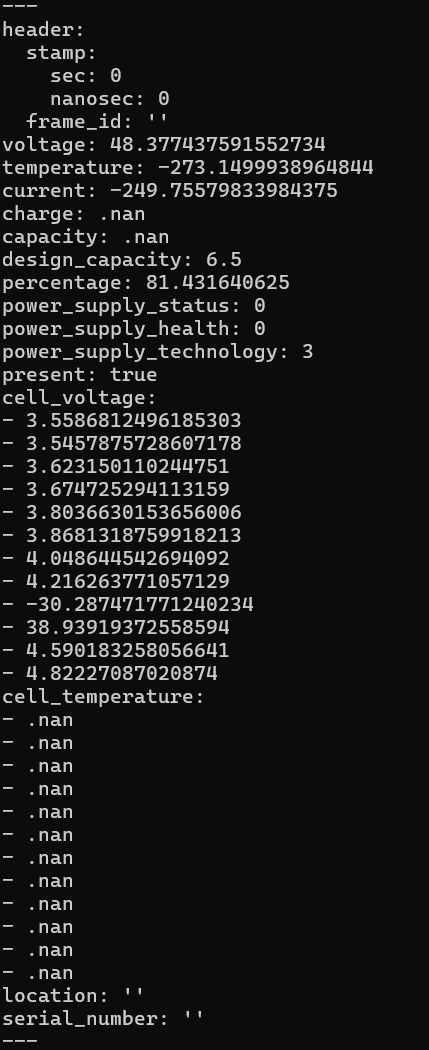
Voici par exemple les nodes pour le topic /RoboGuard/battery
¶ ROS
Un autre image de docker Ros2 a été installer.
Pour partir l'image:
docker run -it --rm ros:humble-ros-core